![]() Micro
Electro Mechanical Systems
Micro
Electro Mechanical Systems
MEMS LABORATORY
![]() Micro
Electro Mechanical Systems
Micro
Electro Mechanical Systems
MEMS LABORATORY
Micro Selfassembly with Electrostatic Force Fields
Massively Parallel Assembly of Microparts (1996-1998)
Team Members
Karl F. Böhringer, Michael Cohn, Ken Goldberg, Roger Howe, Al Pisano (UC Berkeley)
Summary
Assembly is a fundamental issue in the volume production of products that include microscopic (submillimeter) parts. These parts are often fabricated in parallel at high density but must then be assembled into patterns with lower spatial density. In this paper we propose a new approach to microassembly using
(1) ultrasonic vibration to eliminate friction and adhesion, and
(2) electrostatic forces to position and align parts in parallel.We perform experiments on the dynamic and frictional properties of collections of microscopic parts under these conditions. We first demonstrate that ultrasonic vibration can be used to overcome adhesive forces; we also compare part behavior in air and vacuum. Next, we demonstrate that parts can be positioned and aligned using a combination of vibration and electrostatic forces. Finally, we demonstrate part sorting by size.
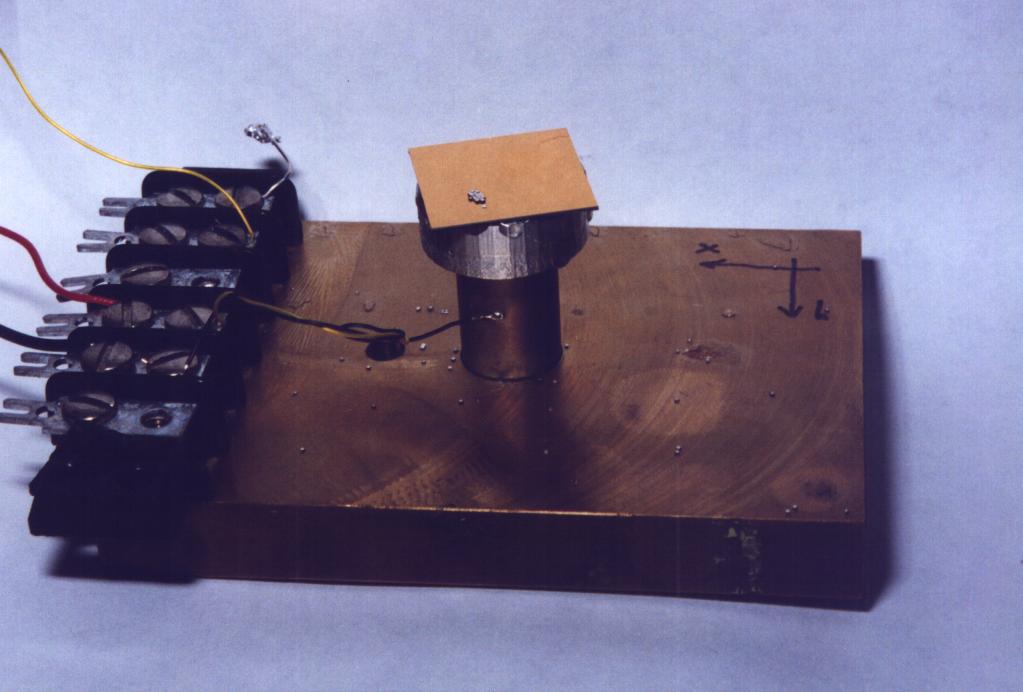
Tribological Experiments: Small particles (sides approximately 0.2 - 0.5 mm) were dropped onto a flat gold-covered silicon substrate, which was attached to a piezoelectric transducer. When no signal is applied to the piezo, the particles tend to stick to the substrate and to each other due static charges, capillary or Van der Waals forces. After applying sinusoidal voltages, the particles break contact and exhibit random "Brownian motion" patterns if the surface is carefully leveled. Tilting of the substrate surface by less than 0.2 percent is sufficient to make the particles move in a particular direction. This implies that friction is negligible.
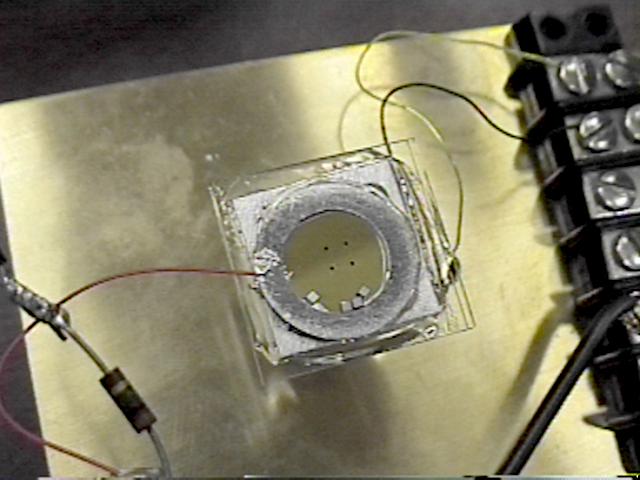
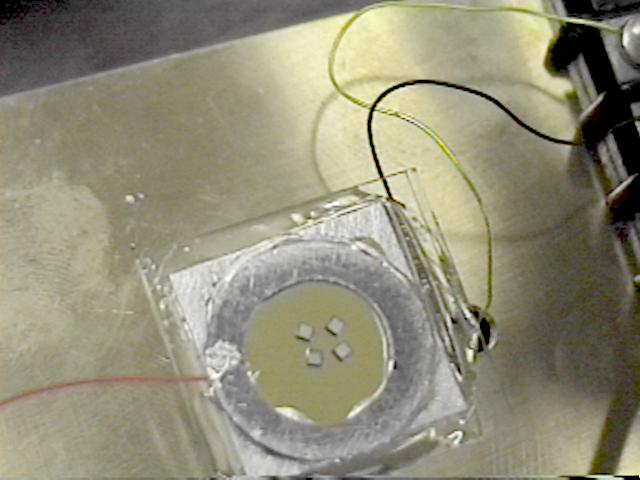
Figure 1: Experimental setup. Piezoelectric shaker table and Cr-Au substrate. Small surface-mount microparts can be seen in the front left quadrant of the substrate. Figure 2: Parallel microassembly with electrostatic force fields: Surface-mount capacitors are placed onto a glass substrate with a 100 nm thin patterned Cr-Au electrode. Frictional and adhesive forces are overcome by ultrasonic vibration. Figure 3: Voltage applied to the electrode creates an electrostatic field. The parts are attracted to the apertures in the electrode (dark squares) and are trapped there. Electrostatic Selfassembly: The substrate from Figure 1 was replaced by a dielectric plate with a continuous lower electrode and a lithographically patterned upper electrode which contains one or more small apertures (0.5 mm width). This electrode design results in fringing fields which polarize neutral particles, so that they are attracted to the apertures and get trapped there. Once a particle is trapped, it reduces the fringing field, which prevents attraction of more particles to this location.
Selected Publications
- K. F. Böhringer, Ronald S. Fearing, Ken Y. Goldberg, "Microassembly." In Shimon Nof, editor, The Handbook of Industrial Robotics (2nd edition), pp. 1045-1066, John Wiley & Sons, February 1999. Paper.
- M. B. Cohn, K. F. Böhringer, J. M. Novorolski, A. Singh, C. G. Keller, K. Y. Goldberg, R. T. Howe, "Microassembly Technologies for MEMS." SPIE Micromachining and Microfabrication, Conference on Micromachining and Microfabrication Process Technology IV, pp. 2-16, Santa Clara, CA, September 21-22, 1998 (invited paper / keynote address).
- K. F. Böhringer, K. Goldberg, M. Cohn, R. Howe, and A. Pisano, "Parallel Microassembly Using Electrostatic Force Fields." IEEE International Conference on Robotics and Automation (ICRA), p. 1204-1211, Leuven, Belgium, May 16-20, 1998. Paper.
A complete list of our publications (many of them available online) can be found here.
Acknowledgements
- NSF CDA-9726389, IRI-9553197, IRI9157051), IRI- 9531837
- NSF CISE Postdoctoral Associateship in Experimental Computer Science to Karl F. Böhringer CDA- 9705022
© Karl F. Böhringer, Department of Electrical Engineering, Box 352500, Seattle, WA 98195-2500, USA